Когда Crazyflie 2.X используется вместе с системой позиционирования Loco Positioning System, информация о местоположении может использоваться для полуавтоматического полета, помощи пилоту в управлении полетом, а также для автономного полета по сценарию.
Перезапустите Crazyflie
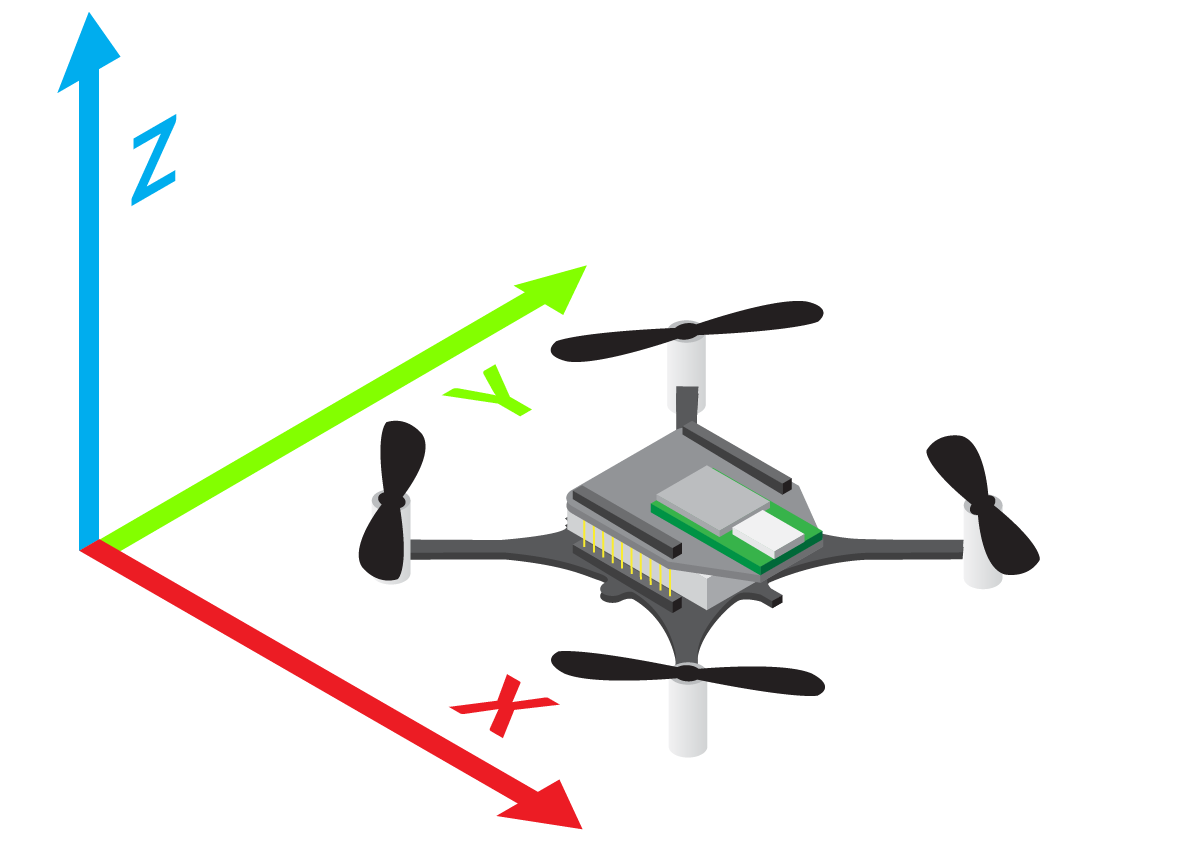
- Поместите микробеспилотник в центр летной зоны на ровную поверхность лицевой стороной к оси Х системы координат
- Включите или перезапустите Crazyflie 2.X
Для полуавтоматического полета используйте в клиенте режим «Удержание положения». Этот режим позволит вам контролировать изменения координат x/y/рыскания/высоты вместо крена/тангажа/рыскания/тяги. Таким образом, при отпускании стиков микробеспилотник останется в прежнем положении.
Подключение к Crazyflie 2.X
- Откройте приложение клиента
- Подключитесь к Crazyflie 2.X
- Для стабилизации определения местоположения может потребоваться пара секунд. Убедитесь, что местоположение во вкладке LPS соответствует местоположению Crazyflie в реальности.
Переведите полуавтоматический режим в режим удержания положения (position hold)
- Откройте вкладку полетов
- В выпадающем списке полуавтоматического режима выберите «Position hold»
Проверка геймпада
- Отцентрируйте стики на геймпаде
- Откройте вкладку полетов и проверьте, чтобы в разделе «Target» значения тангажа (pitch) и крена (roll) были равны [0.0]. Если эти значения не соответствуют нулю, когда вы отпустите стики, микробеспилотник будет двигаться медленно.
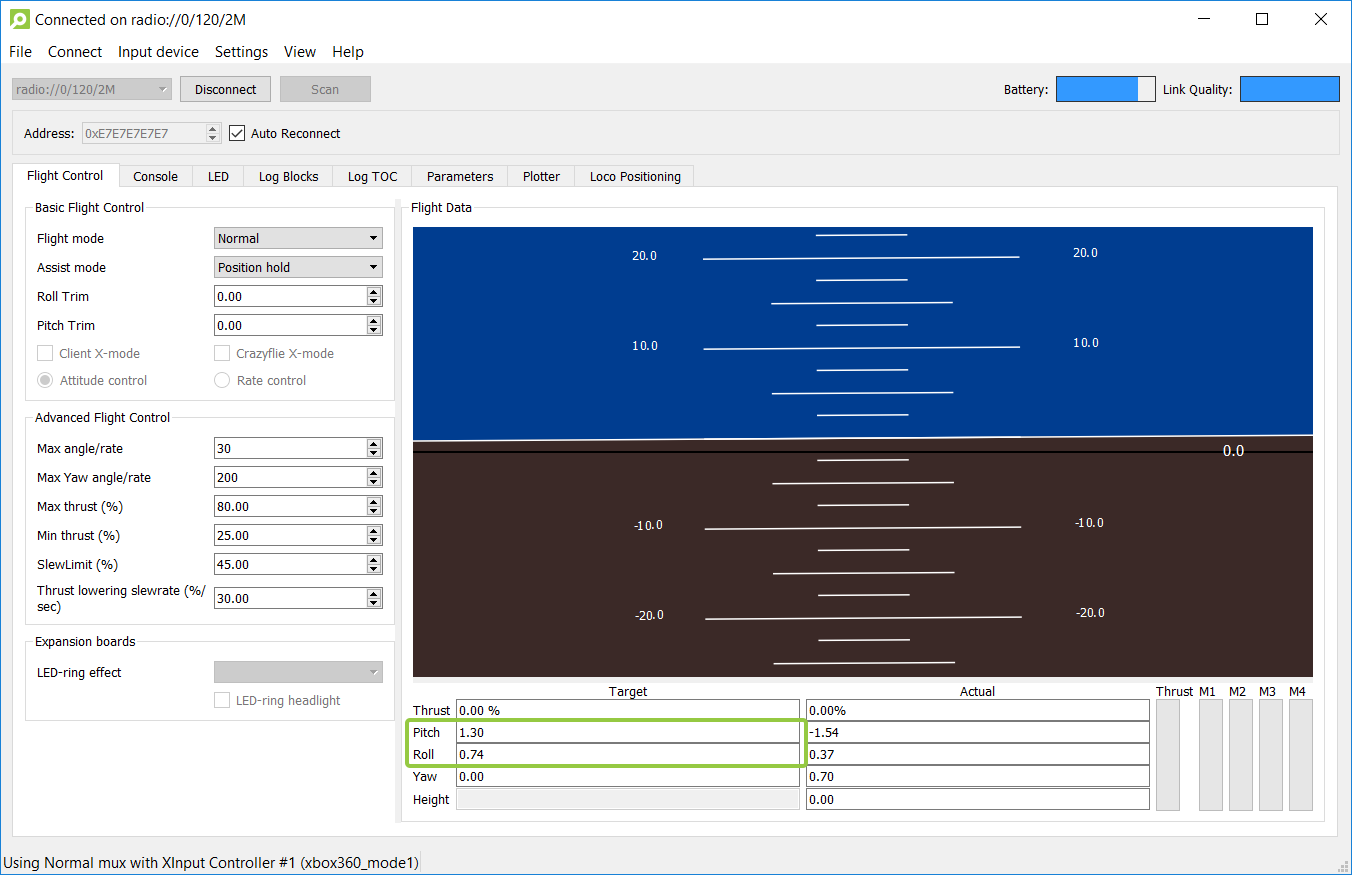
На изображении выше видно, что значения тангажа и крена не равны [0.0]. Это может привести к тому, что Crazyflie будет дрейфовать, когда вы отпустите стики.
Полет с использованием геймпада
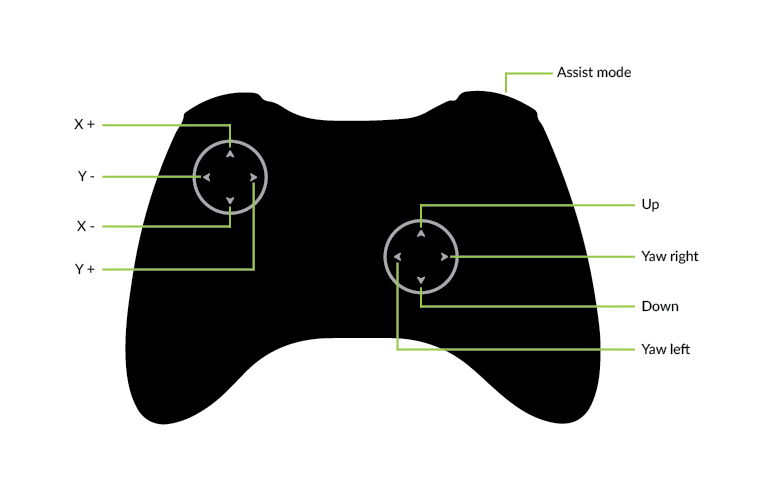
- Нажмите и удерживайте кнопку полуавтоматического режима на геймпаде, чтобы активировать этот режим.
- Нажмите «up» для взлета и движения вверх. Во время тестирования держитесь ближе к земле, но не ниже 20 см, чтобы избежать турбулентности.
- Теперь вы можете летать с помощью стика x/y, как показано на изображении ниже. Нажатие X+ будет перемещать Crazyflie по оси X+ вашей системы координат. То же касается другой оси.
- Если что-то выходит из-под контроля, отпустите стики и кнопку полуавтоматического режима, чтобы микробеспилотник упал на землю.
Автономный полет предполагает, что Crazyflie летает без управления пилотом, а с использованием определенного сценария. Эта тема выходит за рамки данного руководства, поэтому здесь мы расскажем кратко об основах автономного полета.
Схема работы
Самый простой способ начать подготовку к автономному полету – использовать сценарий Python, запущенный на вашем ПК. Он заменит клиента Crazyflie, равно как и геймпад из предыдущего раздела.
Сценарий питона запускается на вашем компьютере и отправляет заданные значения на Crazyflie через радиоканал Crazyradio. Заданное значение содержит информацию о том, в каком направлении и с какой скоростью должен двигаться микробеспилотник. А так как Crazyflie получает информацию о своем текущем местоположении от системы позиционирования, у него есть вся информация для автономного полета.
Подготовка
Вам необходимо установить Python на свой компьютер. Вы должны уметь запускать сценарии Python. Пожалуйста, прочитайте необходимую документацию о Python для вашей платформы.
Примеры сценариев
В репозитории Github есть примеры сценариев Python: bitcraze/crazyflie-lib-python. Также вы можете посмотреть их по прямой ссылке.